网站和下载地址
下载地址
https://hub.nuaa.cf/erincatto/box2d/tags
编译工具
1.VS2013
2.cmake
下载地址
编译box2d
下载box2d源码2.4.0,解压。在box2d-2.4.0目录下建立一个build文件夹。用于生成VS2013编译项目。
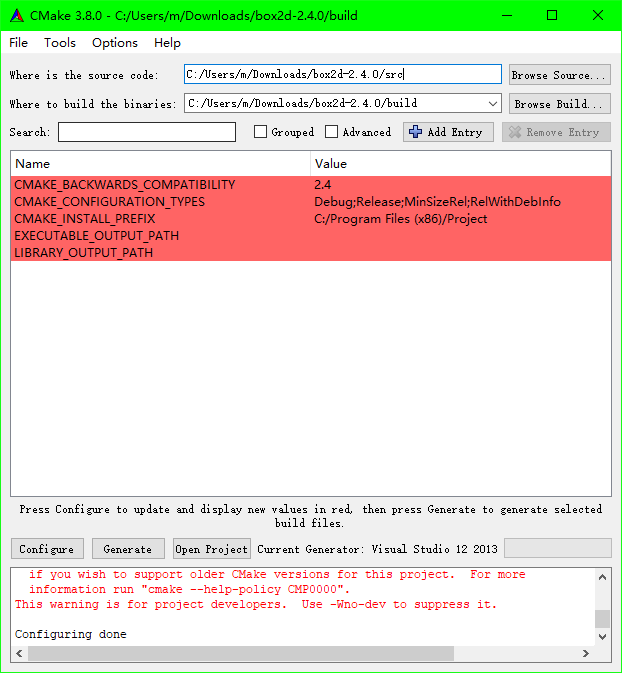
安装cmake,打开cmake-gui,设置源码目录box2d-2.4.0/src,编译目录box2d-2.4.0/build,点击configure

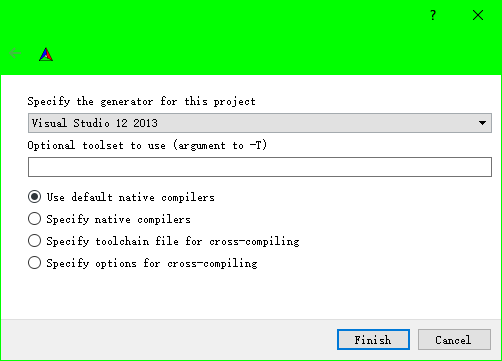
选择VS12 2013,Use default native compilers,点击Finish
点击configure出现红色,这里不用做任何配置。CMAKE_INSTALL_PREFIX设置了也没用
再点击一次configure
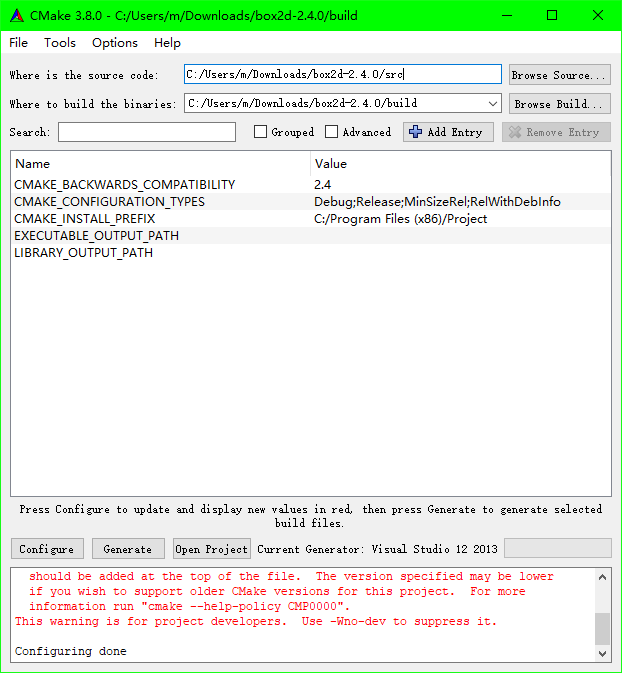
点击generate

打开box2d-2.4.0\build文件夹,打开sln项目文件
右键ALL_BUILD,生成

分别生成Debug和Release版。
生成的库文件box2d.lib在box2d-2.4.0\build\Release和box2d-2.4.0\build\Debug文件夹里面
头文件在box2d-2.4.0\include文件夹
helloworld测试
使用VS2013新建一个win32命令行项目
写一个helloworld程序
/*
* Copyright (c) 2006-2007 Erin Catto http://www.box2d.org
*
* This software is provided 'as-is', without any express or implied
* warranty. In no event will the authors be held liable for any damages
* arising from the use of this software.
* Permission is granted to anyone to use this software for any purpose,
* including commercial applications, and to alter it and redistribute it
* freely, subject to the following restrictions:
* 1. The origin of this software must not be misrepresented; you must not
* claim that you wrote the original software. If you use this software
* in a product, an acknowledgment in the product documentation would be
* appreciated but is not required.
* 2. Altered source versions must be plainly marked as such, and must not be
* misrepresented as being the original software.
* 3. This notice may not be removed or altered from any source distribution.
*/
#include <Box2D/Box2D.h>
#include <stdio.h>
// This is a simple example of building and running a simulation
// using Box2D. Here we create a large ground box and a small dynamic
// box.
// There are no graphics for this example. Box2D is meant to be used
// with your rendering engine in your game engine.
int main(int argc, char** argv)
{
B2_NOT_USED(argc);
B2_NOT_USED(argv);
// Define the gravity vector.
b2Vec2 gravity(0.0f, -10.0f);
// Construct a world object, which will hold and simulate the rigid bodies.
b2World world(gravity);
// Define the ground body.
b2BodyDef groundBodyDef;
groundBodyDef.position.Set(0.0f, -10.0f);
// Call the body factory which allocates memory for the ground body
// from a pool and creates the ground box shape (also from a pool).
// The body is also added to the world.
b2Body* groundBody = world.CreateBody(&groundBodyDef);
// Define the ground box shape.
b2PolygonShape groundBox;
// The extents are the half-widths of the box.
groundBox.SetAsBox(50.0f, 10.0f);
// Add the ground fixture to the ground body.
groundBody->CreateFixture(&groundBox, 0.0f);
// Define the dynamic body. We set its position and call the body factory.
b2BodyDef bodyDef;
bodyDef.type = b2_dynamicBody;
bodyDef.position.Set(0.0f, 4.0f);
b2Body* body = world.CreateBody(&bodyDef);
// Define another box shape for our dynamic body.
b2PolygonShape dynamicBox;
dynamicBox.SetAsBox(1.0f, 1.0f);
// Define the dynamic body fixture.
b2FixtureDef fixtureDef;
fixtureDef.shape = &dynamicBox;
// Set the box density to be non-zero, so it will be dynamic.
fixtureDef.density = 1.0f;
// Override the default friction.
fixtureDef.friction = 0.3f;
// Add the shape to the body.
body->CreateFixture(&fixtureDef);
// Prepare for simulation. Typically we use a time step of 1/60 of a
// second (60Hz) and 10 iterations. This provides a high quality simulation
// in most game scenarios.
float timeStep = 1.0f / 60.0f;
int32 velocityIterations = 6;
int32 positionIterations = 2;
// This is our little game loop.
for (int32 i = 0; i < 60; ++i)
{
// Instruct the world to perform a single step of simulation.
// It is generally best to keep the time step and iterations fixed.
world.Step(timeStep, velocityIterations, positionIterations);
// Now print the position and angle of the body.
b2Vec2 position = body->GetPosition();
float angle = body->GetAngle();
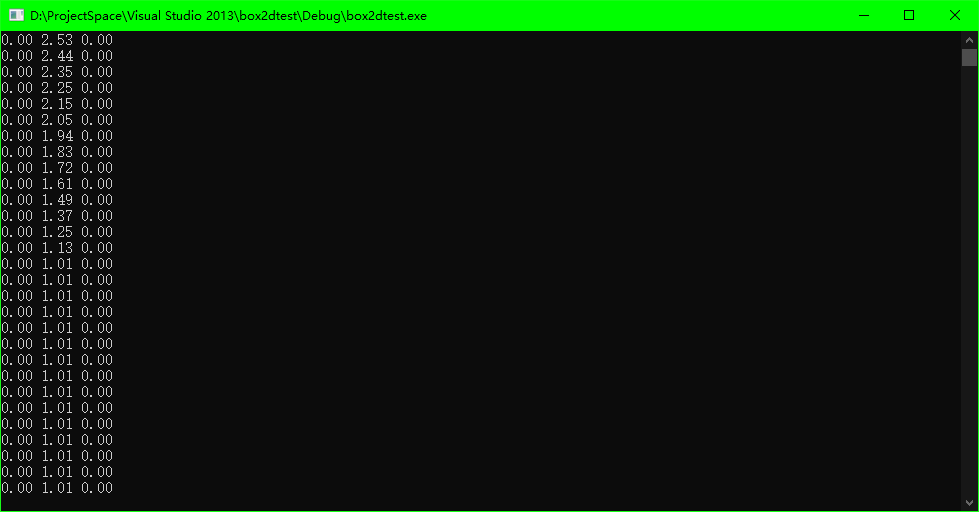
printf("%4.2f %4.2f %4.2f\n", position.x, position.y, angle);
}
// When the world destructor is called, all bodies and joints are freed. This can
// create orphaned pointers, so be careful about your world management.
getchar();
return 0;
}
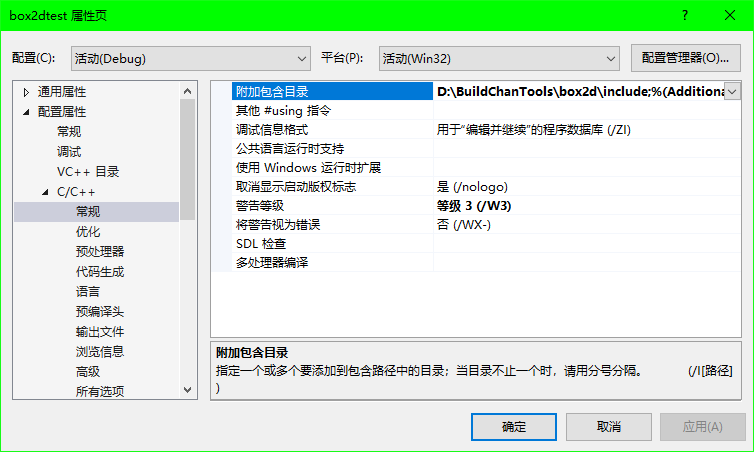
项目,属性,配置属性,c/c++,附加包含目录,设置头文件目录
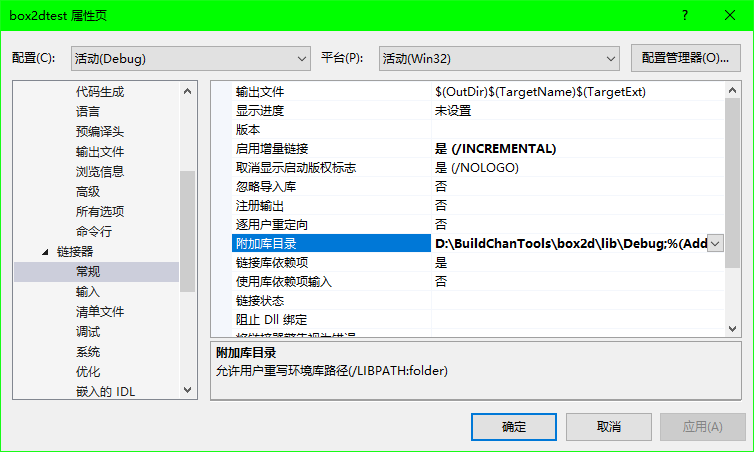
链接器,常规,附加库目录,设置box2d.lib文件目录
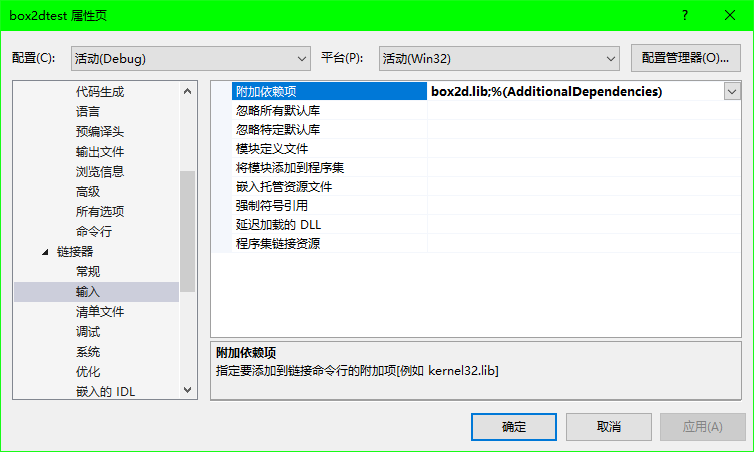
链接器,输入,附加依赖项,添加box2d.lib
编译运行,打印出下面的数字,说明环境配置成功